.png)
.png)
The competition aligns with the national space development strategy and has the theme of "Space Exploration" Teams must build a legged robot and code to complete a series of tasks on a designated challenge map within a time limit. Rankings will be based on completion time; the shorter the time, the higher the score.
Participants
Suitable for P4-S3 (with Primary school and secondary school divisions)
Team Composition
Teams will consist of four students each
The map features three main tasks that test whether the students' legged robots can respond flexibly.
*The map is for reference only; the actual competition layout may vary.
.png)
The first task involves navigating obstacles to reach a designated location, testing the robot's control and pathfinding skills.
.png)
The second task requires students to adjust the position of obstacles using the robot leg, assessing the robot's control of movement angles and balance.
.png)
The last task requires the robot to press the "COMPLETE" button to stop the timer, which challenges the stability of the robot's design.
Through a structured training program, students will debug mechanical legs, plan walking patterns, and learn radio remote control with micro:bit, gradually mastering advanced programming skills. Additionally, they will receive strategies to prepare for the robotics battle!
Sessions: 6 classes (1.5 hours per class)
Group Size: 16-24 participants (4 students per group)
Target Audience: Suitable for P4 to S3
Learning Objectives:
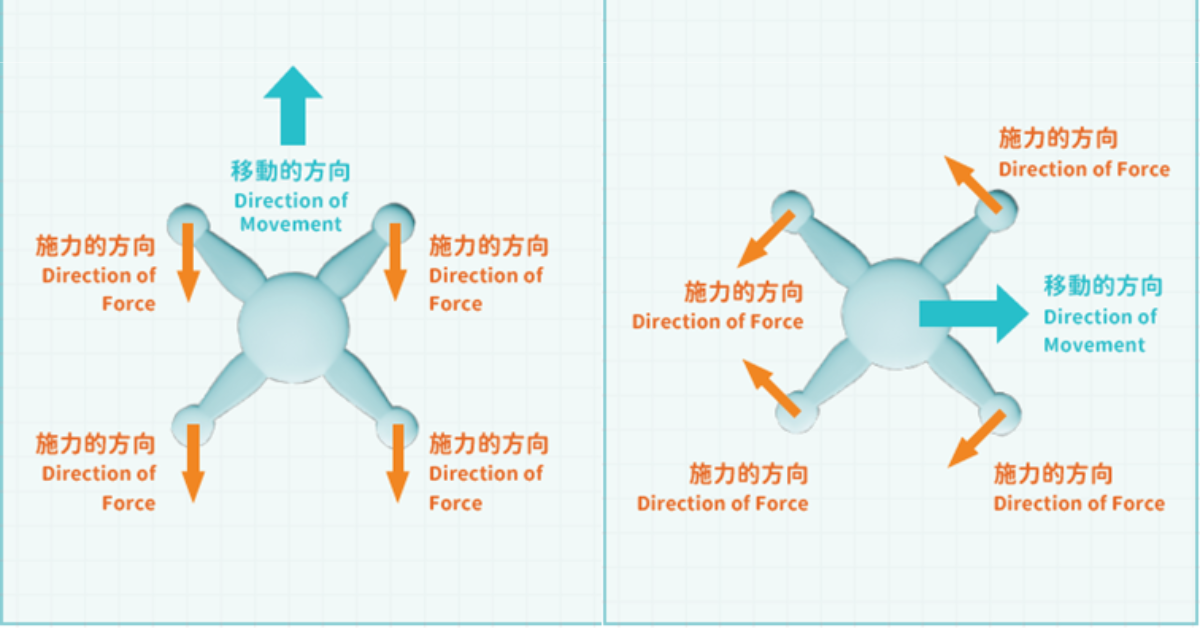
- Understand the fundamentals of legged robot movement and scientific principles (center of gravity, support base, balance, and force direction).
- Learn to use micro:bit expansion boards and control servo motors
- Explore the wireless communication capabilities of micro:bit
- Grasp the walking mechanics of multi-legged robots: the principles of "stepping and pushing,"
- Write functions for turning and side-stepping to enhance logical integration skills
- Test and adjust robot performance based on competition map tasks
Thank you for your interest! Your inquiry is well received and we will get back to you soon!
